当前位置:
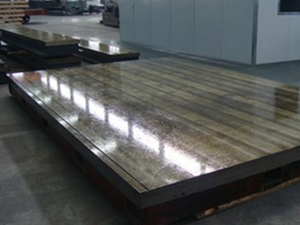
当前位置: 三维柔性焊接平台的特点
 发布时间:2023-06-08
发布时间:2023-06-08
我们一起来了解一下三维柔性焊接平台的特点有哪些?..
1、三维柔性焊接平台控制系统通过控制伺服电机实现柔性工装中大量定位点的运动控制,柔性工装的公用决定了在应用中一般只关心其各定位点终的位置精度,而不关心运动轨迹精度,因此,柔性工装数控系统一般不需具备多轴同步和差不功能。
2、三维柔性焊接平台控制系统要具备控制大量执行元件的能力,特别是需要具备准确控制超出轴的能力。同时要求工装控制系统具有开放性,伺服轴(电机)数量增减方便,而且数量增减不影响控制精度。
3、为适应工装设备一体化的发展趋势,柔性工装控制系统要能适应多种总线拓扑结构,以便能与其他数控设备的数控系统集成。
- 上一篇:铸铁平台的清砂问题
- 下一篇:使用前调整对于铸铁平台的重要性
热销产品
Product














备案号:冀ICP备14007559号-3
Copyright © 2018 - 2019 国晟机械 All Right Reserved.